| ปริมาณ: | |
|---|---|








j89xu9734
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | j89xu9732 | j89xu9733 | j89xu9734 | j89xu9735 | J89xu9736 |
| คู่เสา | 2 | 3 | 4 | 5 | 6 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 60 ' | ≤± 40 ' | ≤± 30 ' | ≤± 24 ' | ≤± 20 ' |
| การเปลี่ยนเฟส | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | ||||
| ความต้านทานฉนวน | 250 MΩนาที | ||||
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 45 มม. | 45 มม. | 45 มม. | 45 มม. | 45 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | ||||
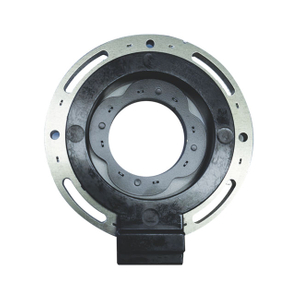
การออกแบบและการก่อสร้างข้อมูลเชิงลึก
การออกแบบ VRRS ใช้ประโยชน์จากแนวคิดของการลังเลแม่เหล็กโดยมุ่งเน้นไปที่การทำงานร่วมกันระหว่างแกนเฟอร์โรมานิกของฟันของโรเตอร์และแกน ferromagnetic ของสเตเตอร์
ฟันของโรเตอร์สร้างช่องว่างของอากาศด้วยแกนสเตเตอร์และเมื่อพวกเขาจัดตำแหน่งในระหว่างการหมุนการฝืนแม่เหล็กจะลดลงเพิ่มความหนาแน่นฟลักซ์
การแปรผันของความหนาแน่นฟลักซ์นี้ทำให้เกิดแรงดันไฟฟ้าในขดลวดสเตเตอร์ทำให้สามารถกำหนดมุมของโรเตอร์ได้
ข้อดี
VRRs มีความสำคัญต่อความสามารถในการเสนอวิธีการที่เชื่อถือได้ในการวัดการเคลื่อนไหวในเครื่องจักรหมุน
ความทนทานต่อปัจจัยด้านสิ่งแวดล้อมทำให้พวกเขาสมบูรณ์แบบสำหรับการตั้งค่าอุตสาหกรรมที่ยากลำบาก
ความเรียบง่ายและค่าใช้จ่ายของ VRRs ทำให้พวกเขาเป็นตัวเลือกที่ต้องการในแอปพลิเคชันที่มีความแม่นยำสูง
แอปพลิเคชัน
ตัวแปร Resultance Resolver นั้นเป็นประโยชน์อย่างยิ่งสำหรับแอปพลิเคชัน HEV/EV ซึ่งตำแหน่งและการตรวจจับความเร็วที่แม่นยำนั้นมีความสำคัญต่อการควบคุมมอเตอร์ที่มีประสิทธิภาพและประสิทธิภาพของยานพาหนะ
พารามิเตอร์หลัก
| แบบอย่าง | j89xu9732 | j89xu9733 | j89xu9734 | j89xu9735 | J89xu9736 |
| คู่เสา | 2 | 3 | 4 | 5 | 6 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 60 ' | ≤± 40 ' | ≤± 30 ' | ≤± 24 ' | ≤± 20 ' |
| การเปลี่ยนเฟส | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | ||||
| ความต้านทานฉนวน | 250 MΩนาที | ||||
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 45 มม. | 45 มม. | 45 มม. | 45 มม. | 45 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | ||||
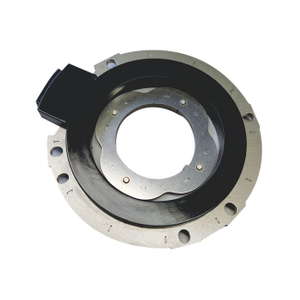
การออกแบบและการก่อสร้างข้อมูลเชิงลึก
การออกแบบ VRRS ใช้ประโยชน์จากแนวคิดของการลังเลแม่เหล็กโดยมุ่งเน้นไปที่การทำงานร่วมกันระหว่างแกนเฟอร์โรมานิกของฟันของโรเตอร์และแกน ferromagnetic ของสเตเตอร์
ฟันของโรเตอร์สร้างช่องว่างของอากาศด้วยแกนสเตเตอร์และเมื่อพวกเขาจัดตำแหน่งในระหว่างการหมุนการฝืนแม่เหล็กจะลดลงเพิ่มความหนาแน่นฟลักซ์
การแปรผันของความหนาแน่นฟลักซ์นี้ทำให้เกิดแรงดันไฟฟ้าในขดลวดสเตเตอร์ทำให้สามารถกำหนดมุมของโรเตอร์ได้
ข้อดี
VRRs มีความสำคัญต่อความสามารถในการเสนอวิธีการที่เชื่อถือได้ในการวัดการเคลื่อนไหวในเครื่องจักรหมุน
ความทนทานต่อปัจจัยด้านสิ่งแวดล้อมทำให้พวกเขาสมบูรณ์แบบสำหรับการตั้งค่าอุตสาหกรรมที่ยากลำบาก
ความเรียบง่ายและค่าใช้จ่ายของ VRRs ทำให้พวกเขาเป็นตัวเลือกที่ต้องการในแอปพลิเคชันที่มีความแม่นยำสูง
แอปพลิเคชัน
ตัวแปร Resultance Resolver นั้นเป็นประโยชน์อย่างยิ่งสำหรับแอปพลิเคชัน HEV/EV ซึ่งตำแหน่งและการตรวจจับความเร็วที่แม่นยำนั้นมีความสำคัญต่อการควบคุมมอเตอร์ที่มีประสิทธิภาพและประสิทธิภาพของยานพาหนะ