
| hoeveelheid: | |
|---|---|








J106XFS02658
Kronkelend
Hoofparameters
| Model | J106XFS02658 |
| Paalpare | 1: 8 |
| Insetspanning | AC 26 VRMS |
| Insetfrekwensie | 400 Hz |
| Transformasieverhouding | 0,461 ± 10% |
| Akkuraatheid (van growwe resolver) | ± 30 'Max |
| Akkuraatheid (van fyn resolver) | ± 1 'Max |
| Fase -verskuiwing (van growwe resolver) | 8 ° ± 3 ° |
| Fase -verskuiwing (van fyn resolver) | 30 ° ± 3 ° |
| Insetimpedansie (van growwe resolver) | (3270 ± 491) ω |
| Insetimpedansie (van fyn resolver) | (390 ± 59) ω |
| Uitsetimpedansie (van growwe resolver) | (1100 ± 165) Ω |
| Uitsetimpedansie (van fyn resolver) | (240 ± 36) Ω |
| Diëlektriese sterkte | AC 500 VRMS 1min |
| Isolasieweerstand | 250 MΩ min |
| Maksimum rotasiesnelheid | 750 r / min |
| Bedryfstemperatuurreeks | -55 ℃ tot +155 ℃ |
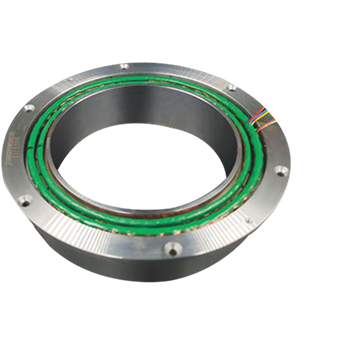
Werkbeginsel
'N Resolver is 'n sensor wat gebruik word om die hoekverplasing tussen die rotor en die stator van 'n motor te meet. Dit bestaan uit 'n stator met opwindingswindings en terugvoering van sinus-kosinus, en 'n rotor van gelamineerde silikonstaal. Die rotor van die resolver is koaksiaal met die motor se rotor. As 'n sinusvormige opwekingssein toegepas word, verander die roterende rotor die magnetiese onwilligheid van die magnetiese stroombaan, wat weer die amplitude van die terugvoerseine van die sinus-kosinwindings beïnvloed. Die hoekinligting wat in hierdie seine vervat is, word dan onttrek, wat die beginsel agter die hoekmeting van die resolusie is.
Modelkeuse
Die paalpare word gewoonlik gekies om by die aantal paalpare van die motor te pas. Dit verseker dat die gemete elektriese hoek nie omskakeling nodig het vir die koördinaattransformasie van die omskakelaar nie.
As die meting van die elektriese hoekfout egter aan die vereistes voldoen, is dit moontlik om paalpare te gebruik wat nie ooreenstem nie. Byvoorbeeld, as die motor 4 paalpare het en die resolver 2 paalpare het, wanneer die resolver met 90 ° elektriese hoek draai, is die ooreenstemmende elektriese hoek vir die motor 180 °, en omgekeerd.
Teoreties, hoe hoër die aantal paalpare, hoe kleiner is die elektriese fout. As die resolver meer paalpare het as die motor, moet die maksimum elektriese hoekfrekwensie oorweeg word. Die resolver moet uiteindelik met 'n dekoderende chip gebruik word. As die elektriese hoekfrekwensie te hoog is, kan die tweede-orde-stelsel moontlik nie volg nie, wat dit onmoontlik maak om die hoek op te los.
Hoofparameters
| Model | J106XFS02658 |
| Paalpare | 1: 8 |
| Insetspanning | AC 26 VRMS |
| Insetfrekwensie | 400 Hz |
| Transformasieverhouding | 0,461 ± 10% |
| Akkuraatheid (van growwe resolver) | ± 30 'Max |
| Akkuraatheid (van fyn resolver) | ± 1 'Max |
| Fase -verskuiwing (van growwe resolver) | 8 ° ± 3 ° |
| Fase -verskuiwing (van fyn resolver) | 30 ° ± 3 ° |
| Insetimpedansie (van growwe resolver) | (3270 ± 491) ω |
| Insetimpedansie (van fyn resolver) | (390 ± 59) ω |
| Uitsetimpedansie (van growwe resolver) | (1100 ± 165) Ω |
| Uitsetimpedansie (van fyn resolver) | (240 ± 36) Ω |
| Diëlektriese sterkte | AC 500 VRMS 1min |
| Isolasieweerstand | 250 MΩ min |
| Maksimum rotasiesnelheid | 750 r / min |
| Bedryfstemperatuurreeks | -55 ℃ tot +155 ℃ |
Werkbeginsel
'N Resolver is 'n sensor wat gebruik word om die hoekverplasing tussen die rotor en die stator van 'n motor te meet. Dit bestaan uit 'n stator met opwindingswindings en terugvoering van sinus-kosinus, en 'n rotor van gelamineerde silikonstaal. Die rotor van die resolver is koaksiaal met die motor se rotor. As 'n sinusvormige opwekingssein toegepas word, verander die roterende rotor die magnetiese onwilligheid van die magnetiese stroombaan, wat weer die amplitude van die terugvoerseine van die sinus-kosinwindings beïnvloed. Die hoekinligting wat in hierdie seine vervat is, word dan onttrek, wat die beginsel agter die hoekmeting van die resolusie is.
Modelkeuse
Die paalpare word gewoonlik gekies om by die aantal paalpare van die motor te pas. Dit verseker dat die gemete elektriese hoek nie omskakeling nodig het vir die koördinaattransformasie van die omskakelaar nie.
As die meting van die elektriese hoekfout egter aan die vereistes voldoen, is dit moontlik om paalpare te gebruik wat nie ooreenstem nie. Byvoorbeeld, as die motor 4 paalpare het en die resolver 2 paalpare het, wanneer die resolver met 90 ° elektriese hoek draai, is die ooreenstemmende elektriese hoek vir die motor 180 °, en omgekeerd.
Teoreties, hoe hoër die aantal paalpare, hoe kleiner is die elektriese fout. As die resolver meer paalpare het as die motor, moet die maksimum elektriese hoekfrekwensie oorweeg word. Die resolver moet uiteindelik met 'n dekoderende chip gebruik word. As die elektriese hoekfrekwensie te hoog is, kan die tweede-orde-stelsel moontlik nie volg nie, wat dit onmoontlik maak om die hoek op te los.




