T: +86-15800900153
E: [email protected]. Cn
E: [email protected]. Cn
Št. 1230, cesta Beiwu, okrožje Minhang, Šanghaj, Kitajska

| Količina: | |
|---|---|








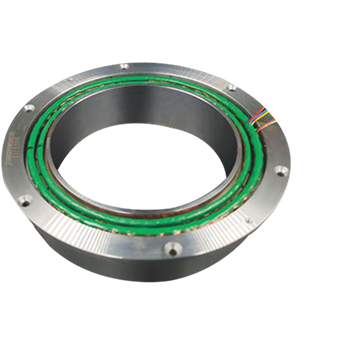
J106XFS02658
Windouble
Glavni parametri
| Model | J106XFS02658 |
| Poljski pari | 1: 8 |
| Vhodna napetost | AC 26 VRMS |
| Vhodna frekvenca | 400 Hz |
| Razmerje transformacije | 0,461 ± 10% |
| Natančnost (grobega reševanja) | ± 30 'max |
| Natančnost (finega reševanja) | ± max 1 ' |
| Fazni premik (grobega reševanja) | 8 ° ± 3 ° |
| Fazni premik (finega reševanja) | 30 ° ± 3 ° |
| Vhodna impedanca (grobega reševalca) | (3270 ± 491) ω |
| Vhodna impedanca (finega reševanja) | (390 ± 59) ω |
| Izhodna impedanca (grobega reševanja) | (1100 ± 165) ω |
| Izhodna impedanca (finega reševanja) | (240 ± 36) ω |
| Dielektrična moč | AC 500 VRMS 1min |
| Izolacijska odpornost | 250 MΩ min |
| Največja rotacijska hitrost | 750 vrt./min |
| Območje obratovanja | -55 ℃ do +155 ℃ |
Delovno načelo
Resolver je senzor, ki se uporablja za merjenje kotnega premika med rotorjem in statorjem motorja. Sestavljen je iz statorja z vzbujalnimi naviji in sinusnimi navijimi povratnih informacij ter rotorja iz laminiranega silicijevega jekla. Rotor ločljivosti je koaksialen z rotorjem motorja. Ko se nanese sinusoidni vzbujevalni signal, vrteči se rotor spremeni magnetno nenaklonjenost magnetnega vezja, kar posledično vpliva na amplitudo povratnih signalov iz sinusnih vijakov. Nato se izvlečejo podatki o kot v teh signalih, kar je načelo za merjenje kota razreda.
Izbira modela
Pari pol so na splošno izbrani tako, da ustrezajo številu parov polja motorja. To zagotavlja, da izmerjeni električni kot ne potrebuje pretvorbe za koordinatno transformacijo pretvornika.
Če pa merjenje napake električnega kota ustreza zahtevam, je mogoče uporabiti pare polov, ki se ne ujemajo. Na primer, če ima motor 4 pare in razsodnik in ima 2 poljski pari, ko se ločljivost vrti za 90 ° električni kot, je ustrezen električni kot za motor 180 ° in obratno.
Teoretično je večje število parov polov, manjša je električna napaka. Kadar ima razsodnik več parov pol kot motor, je treba upoštevati največjo frekvenco električnega kota. Resoluver je na koncu treba uporabiti z dekodirajočim čipom. Če je frekvenca električnega kota previsoka, sistem drugega reda morda ne bo mogel slediti, zaradi česar ni mogoče rešiti kot.
Glavni parametri
| Model | J106XFS02658 |
| Poljski pari | 1: 8 |
| Vhodna napetost | AC 26 VRMS |
| Vhodna frekvenca | 400 Hz |
| Razmerje transformacije | 0,461 ± 10% |
| Natančnost (grobega reševanja) | ± 30 'max |
| Natančnost (finega reševanja) | ± max 1 ' |
| Fazni premik (grobega reševanja) | 8 ° ± 3 ° |
| Fazni premik (finega reševanja) | 30 ° ± 3 ° |
| Vhodna impedanca (grobega reševalca) | (3270 ± 491) ω |
| Vhodna impedanca (finega reševanja) | (390 ± 59) ω |
| Izhodna impedanca (grobega reševanja) | (1100 ± 165) ω |
| Izhodna impedanca (finega reševanja) | (240 ± 36) ω |
| Dielektrična moč | AC 500 VRMS 1min |
| Izolacijska odpornost | 250 MΩ min |
| Največja rotacijska hitrost | 750 vrt./min |
| Območje obratovanja | -55 ℃ do +155 ℃ |
Delovno načelo
Resolver je senzor, ki se uporablja za merjenje kotnega premika med rotorjem in statorjem motorja. Sestavljen je iz statorja z vzbujalnimi naviji in sinusnimi navijimi povratnih informacij ter rotorja iz laminiranega silicijevega jekla. Rotor ločljivosti je koaksialen z rotorjem motorja. Ko se nanese sinusoidni vzbujevalni signal, vrteči se rotor spremeni magnetno nenaklonjenost magnetnega vezja, kar posledično vpliva na amplitudo povratnih signalov iz sinusnih vijakov. Nato se izvlečejo podatki o kot v teh signalih, kar je načelo za merjenje kota razreda.
Izbira modela
Pari pol so na splošno izbrani tako, da ustrezajo številu parov polja motorja. To zagotavlja, da izmerjeni električni kot ne potrebuje pretvorbe za koordinatno transformacijo pretvornika.
Če pa merjenje napake električnega kota ustreza zahtevam, je mogoče uporabiti pare polov, ki se ne ujemajo. Na primer, če ima motor 4 pare in razsodnik in ima 2 poljski pari, ko se ločljivost vrti za 90 ° električni kot, je ustrezen električni kot za motor 180 ° in obratno.
Teoretično je večje število parov polov, manjša je električna napaka. Kadar ima razsodnik več parov pol kot motor, je treba upoštevati največjo frekvenco električnega kota. Resoluver je na koncu treba uporabiti z dekodirajočim čipom. Če je frekvenca električnega kota previsoka, sistem drugega reda morda ne bo mogel slediti, zaradi česar ni mogoče rešiti kot.




