Glavni parametri
| Model | J106XFS02658 |
| Parovi stupa | 1: 8 |
| Ulazni napon | AC 26 VRMS |
| Ulazna frekvencija | 400 Hz |
| Omjer transformacije | 0,461 ± 10% |
| Točnost (od grubog razlučivača) | ± 30 'Max |
| Točnost (finog razlučivača) | ± 1 'max |
| Fazni pomak (od grubog razlučivača) | 8 ° ± 3 ° |
| Fazni pomak (od finog razlučivača) | 30 ° ± 3 ° |
| Ulazna impedancija (od grubog razlučivača) | (3270 ± 491) ω |
| Ulazna impedancija (od finog razlučivača) | (390 ± 59) ω |
| Izlazna impedancija (od grubog razlučivača) | (1100 ± 165) Ω |
| Izlazna impedancija (od finog razlučivača) | (240 ± 36) Ω |
| Dielektrična čvrstoća | AC 500 VRMS 1min |
| Otpor na izolaciju | 250 MΩ min |
| Maksimalna brzina rotacije | 750 o / min |
| Radni temperaturni raspon | -55 ℃ do +155 ℃ |
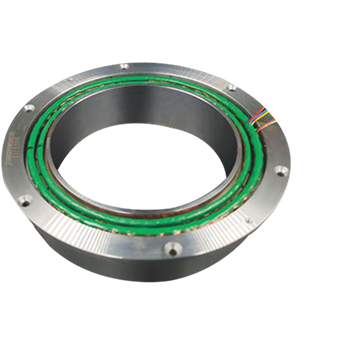
Princip rada
Razlučivač je senzor koji se koristi za mjerenje kutnog pomaka između rotora i statora motora. Sastoji se od statora s namotama pobude i namotama od sinusnog konja i rotora izrađenog od laminiranog silicijskog čelika. Rotor razlučivača je koaksijalan s rotorom motora. Kada se primijeni signal sinusoidnog pobuđenja, rotor rotacije mijenja magnetsku nevoljnost magnetskog kruga, što zauzvrat utječe na amplitudu povratnih signala iz namota sinusnog koša. Podaci o kutu sadržani u tim signalima zatim se izdvajaju, što je princip koji stoji iza mjerenja kuta.
Odabir modela
Parovi pola uglavnom su odabrani tako da odgovaraju broju parova motora. To osigurava da odmjereni električni kut ne zahtijeva pretvorbu za transformaciju koordinata pretvarača.
Međutim, ako mjerenje pogreške električnog kuta ispunjava zahtjeve, moguće je koristiti parove stupa koji se ne podudaraju. Na primjer, ako motor ima parove od 4 polja, a razlučivač ima 2 pol parova, kada se razlučivač rotira za 90 ° električni kut, odgovarajući električni kut za motor je 180 °, i obrnuto.
Teoretski, što je veći broj parova pola, to je manja električna pogreška. Kada razlučivač ima više parova pola od motora, mora se uzeti u obzir maksimalna frekvencija električnog kuta. Odlučivač u konačnici treba koristiti s čipom za dekodiranje. Ako je frekvencija električnog kuta previsoka, sustav drugog reda možda neće moći slijediti, što onemogućuje rješavanje kuta.