


J68XFW975
רוחוב
פרמטרים עיקריים
| דֶגֶם | J68XFW975 |
| זוגות מוט | 1 |
| מתח קלט | AC 7 VRMS |
| תדר קלט | 10000 הרץ |
| יחס טרנספורמציה | 0.5 ± 10% |
| דִיוּק | ± 10 'מקסימום |
| משמרת פאזה | 9 ° ± 3 ° |
| עכבת קלט | (120 ± 18) Ω |
| עכבת פלט | (360 ± 54) Ω |
| חוזק דיאלקטרי | AC 500 VRMS 1 דקות |
| התנגדות לבידוד | 250 mΩ דקות |
| מהירות סיבוב מקסימאלית | 15000 סל'ד |
| טווח טמפרטורות הפעלה | -55 ℃ עד +155 ℃ |
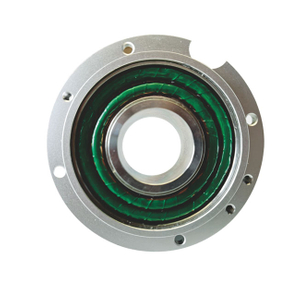
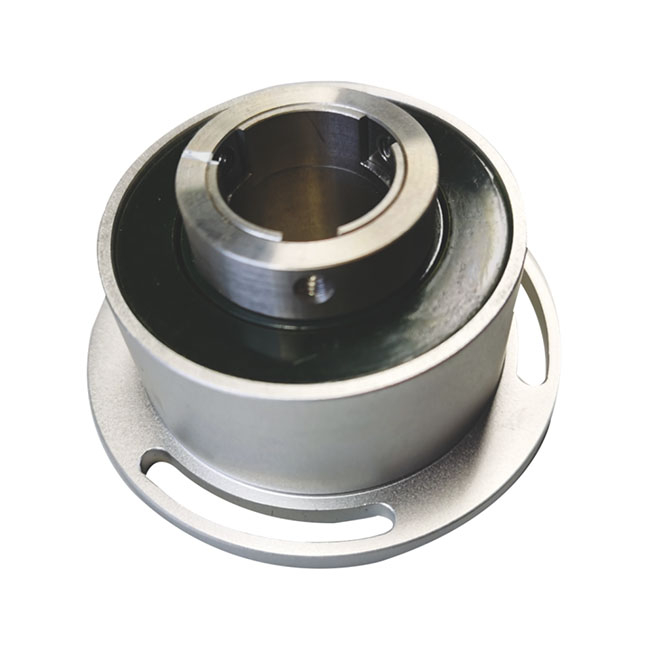
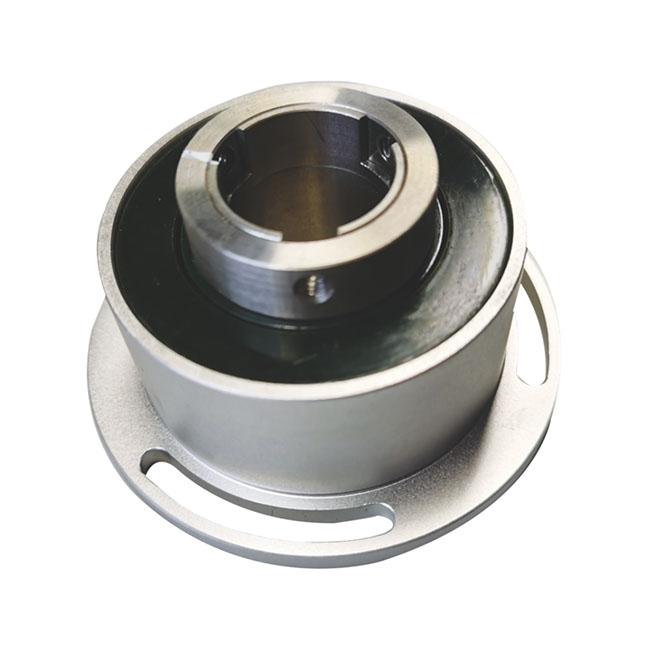
עיקרון מבני של רזולוס סינוס וקוסינוס
פותר הוא מנוע המשמש למטרות מדידה ומשמש לעתים קרובות כזווית או חיישן מהירות. הפיתולים הראשוניים והמשניים של פותר סרוקוס מונחים על הסטטור והרוטור בהתאמה, ומידת הצימוד האלקטרומגנטי בין הפיתולים הראשוניים למשני קשורה קשר הדוק לזווית הסיבוב של הרוטור.
רזולוצי סינקוזין משתמשים במיקומים היחסיים השונים ביניהם כדי לשנות את השראות ההדדית ביניהם, כדי להשיג את המתח הטרמינלי בתפתל המשני (הרוטור) שקשור לסיבוב θ כפונקציה של סינוס וקוסינוס.
מאפייני אות הפלט של הסינוס והפתרון הקוסינוס
רבים חושבים שסינוס ופותר קוסינוס פוגע אות סינוסואידי באחד מתפתל ואות קוסינוס בפיתול אחד, וההבדל בין השניים הוא 90 מעלות, שהוא למעשה תפיסה שגויה. פותר סינוס וקוסינוס שווה ערך למכשיר אפנון משרעת, ואות העירור שווה לאות נשא, בדרך כלל גל סינוס עם תדר של 400 הרץ, 1000 הרץ ומעלה.
האות הסינוס והקוסינוס המשויך למהירות הסיבוב של הרוטור שווה לאות אפנון, וכאשר הפותר הוא נייח, פיתולי הסינוס והקוסינוס פוגעים אות נשא, וכאשר הוא מסתובב, פלט אות אפנון משרעת מודול. כאשר הפותר הוא שני קטבים, תדר העירור הוא 1000 הרץ, הרוטור מסתובב ב 3000R/min, ואות אפנון המשרעת פלט מגל מודולני סינוסואידי 50 הרץ למנשא סינוסואידי 1000 הרץ.
פרמטרים עיקריים
| דֶגֶם | J68XFW975 |
| זוגות מוט | 1 |
| מתח קלט | AC 7 VRMS |
| תדר קלט | 10000 הרץ |
| יחס טרנספורמציה | 0.5 ± 10% |
| דִיוּק | ± 10 'מקסימום |
| משמרת פאזה | 9 ° ± 3 ° |
| עכבת קלט | (120 ± 18) Ω |
| עכבת פלט | (360 ± 54) Ω |
| חוזק דיאלקטרי | AC 500 VRMS 1 דקות |
| התנגדות לבידוד | 250 mΩ דקות |
| מהירות סיבוב מקסימאלית | 15000 סל'ד |
| טווח טמפרטורות הפעלה | -55 ℃ עד +155 ℃ |
עיקרון מבני של רזולוס סינוס וקוסינוס
פותר הוא מנוע המשמש למטרות מדידה ומשמש לעתים קרובות כזווית או חיישן מהירות. הפיתולים הראשוניים והמשניים של פותר סרוקוס מונחים על הסטטור והרוטור בהתאמה, ומידת הצימוד האלקטרומגנטי בין הפיתולים הראשוניים למשני קשורה קשר הדוק לזווית הסיבוב של הרוטור.
רזולוצי סינקוזין משתמשים במיקומים היחסיים השונים ביניהם כדי לשנות את השראות ההדדית ביניהם, כדי להשיג את המתח הטרמינלי בתפתל המשני (הרוטור) שקשור לסיבוב θ כפונקציה של סינוס וקוסינוס.
מאפייני אות הפלט של הסינוס והפתרון הקוסינוס
רבים חושבים שסינוס ופותר קוסינוס פוגע אות סינוסואידי באחד מתפתל ואות קוסינוס בפיתול אחד, וההבדל בין השניים הוא 90 מעלות, שהוא למעשה תפיסה שגויה. פותר סינוס וקוסינוס שווה ערך למכשיר אפנון משרעת, ואות העירור שווה לאות נשא, בדרך כלל גל סינוס עם תדר של 400 הרץ, 1000 הרץ ומעלה.
האות הסינוס והקוסינוס המשויך למהירות הסיבוב של הרוטור שווה לאות אפנון, וכאשר הפותר הוא נייח, פיתולי הסינוס והקוסינוס פוגעים אות נשא, וכאשר הוא מסתובב, פלט אות אפנון משרעת מודול. כאשר הפותר הוא שני קטבים, תדר העירור הוא 1000 הרץ, הרוטור מסתובב ב 3000R/min, ואות אפנון המשרעת פלט מגל מודולני סינוסואידי 50 הרץ למנשא סינוסואידי 1000 הרץ.