


| ปริมาณ: | |
|---|---|








J68XFW975
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | J68XFW975 |
| คู่เสา | 1 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.5 ± 10% |
| ความแม่นยำ | สูงสุด± 10 ' |
| การเปลี่ยนเฟส | 9 °± 3 ° |
| ความต้านทานอินพุต | (120 ± 18) Ω |
| ความต้านทานเอาท์พุท | (360 ± 54) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 15000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
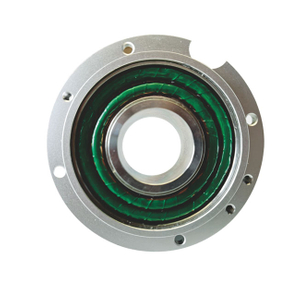
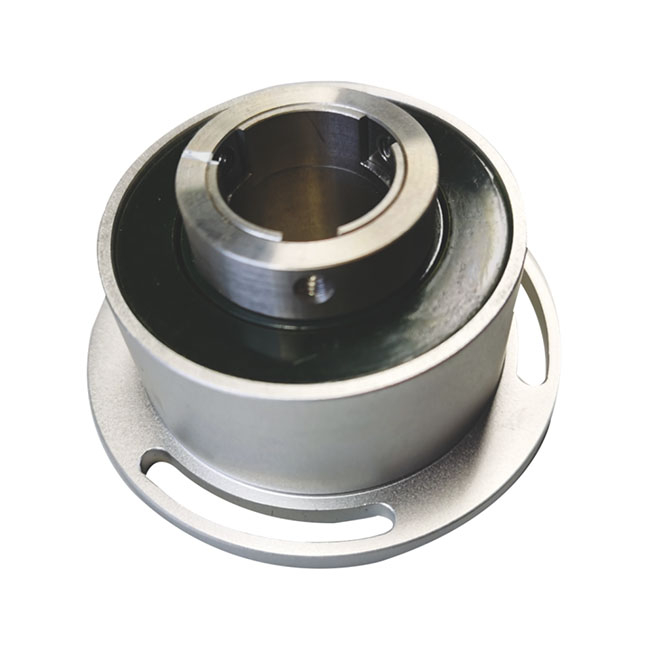
หลักการโครงสร้างของตัวแก้ไขไซน์และโคไซน์
ตัวแก้ไขเป็นมอเตอร์ที่ใช้สำหรับการวัดและมักใช้เป็นเซ็นเซอร์มุมหรือความเร็ว ขดลวดหลักและทุติยภูมิของตัวแก้ไข Serocos จะถูกวางไว้บนสเตเตอร์และโรเตอร์ตามลำดับและระดับของการมีเพศสัมพันธ์แม่เหล็กไฟฟ้าระหว่างขดลวดหลักและทุติยภูมินั้นสัมพันธ์กับมุมการหมุนของโรเตอร์
Sincosine Resolvers ใช้ตำแหน่งสัมพัทธ์ที่แตกต่างกันระหว่างพวกเขาเพื่อเปลี่ยนการเหนี่ยวนำร่วมกันระหว่างพวกเขาเพื่อให้ได้แรงดันไฟฟ้าเทอร์มินัลในม้วนที่สอง (โรเตอร์) ที่เกี่ยวข้องกับการหมุนθเป็นฟังก์ชั่นไซน์และโคไซน์
ลักษณะของสัญญาณเอาต์พุตของไซน์และโคไซน์แก้ไข
หลายคนคิดว่าตัวแก้ไขไซน์และโคไซน์ส่งสัญญาณสัญญาณไซน์ในการคดเคี้ยวครั้งเดียวและสัญญาณโคไซน์ในการคดเคี้ยวครั้งเดียวและความแตกต่างระหว่างทั้งสองคือ 90 °ซึ่งเป็นความเข้าใจผิด ตัวแก้ไขไซน์และโคไซน์นั้นเทียบเท่ากับอุปกรณ์มอดูเลตแอมพลิจูดและสัญญาณการกระตุ้นเทียบเท่ากับสัญญาณพาหะมักจะเป็นคลื่นไซน์ที่มีความถี่ 400Hz, 1,000Hz หรือสูงกว่า
สัญญาณไซน์และโคไซน์ที่เกี่ยวข้องกับความเร็วในการหมุนของโรเตอร์นั้นเทียบเท่ากับสัญญาณการมอดูเลตและเมื่อตัวแก้ไขอยู่กับที่เครื่องขดลวดไซน์และโคไซน์จะส่งสัญญาณสัญญาณพาหะและเมื่อมันหมุนสัญญาณมอดูเลตแอมพลิจูดมอดูเลต เมื่อตัวแก้ไขเป็นสองขั้วความถี่การกระตุ้นคือ 1,000Hz โรเตอร์จะหมุนที่ 3000R/นาทีและสัญญาณการมอดูเลตแอมพลิจูดจะถูกส่งออกจากคลื่นโมดูเลตไซน์ 50Hz ไปยังผู้ให้บริการไซน์ 1000Hz
พารามิเตอร์หลัก
| แบบอย่าง | J68XFW975 |
| คู่เสา | 1 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.5 ± 10% |
| ความแม่นยำ | สูงสุด± 10 ' |
| การเปลี่ยนเฟส | 9 °± 3 ° |
| ความต้านทานอินพุต | (120 ± 18) Ω |
| ความต้านทานเอาท์พุท | (360 ± 54) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 15000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
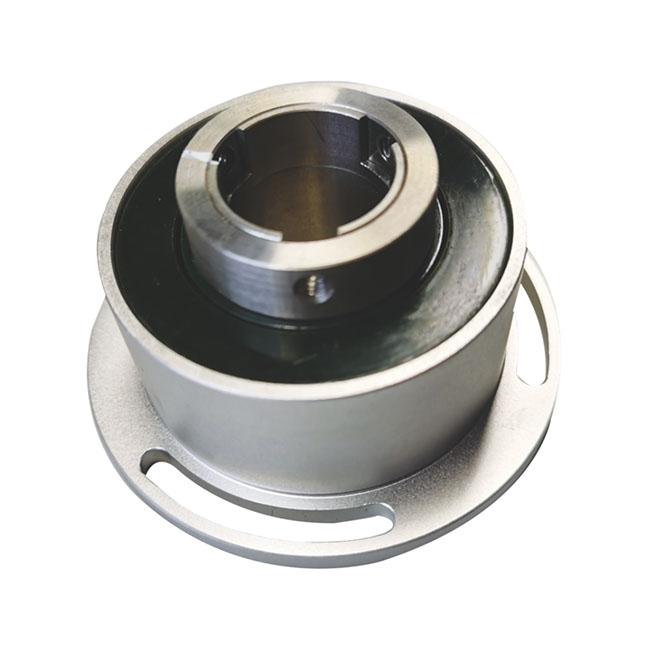
หลักการโครงสร้างของตัวแก้ไขไซน์และโคไซน์
ตัวแก้ไขเป็นมอเตอร์ที่ใช้สำหรับการวัดและมักใช้เป็นเซ็นเซอร์มุมหรือความเร็ว ขดลวดหลักและทุติยภูมิของตัวแก้ไข Serocos จะถูกวางไว้บนสเตเตอร์และโรเตอร์ตามลำดับและระดับของการมีเพศสัมพันธ์แม่เหล็กไฟฟ้าระหว่างขดลวดหลักและทุติยภูมินั้นสัมพันธ์กับมุมการหมุนของโรเตอร์
Sincosine Resolvers ใช้ตำแหน่งสัมพัทธ์ที่แตกต่างกันระหว่างพวกเขาเพื่อเปลี่ยนการเหนี่ยวนำร่วมกันระหว่างพวกเขาเพื่อให้ได้แรงดันไฟฟ้าเทอร์มินัลในม้วนที่สอง (โรเตอร์) ที่เกี่ยวข้องกับการหมุนθเป็นฟังก์ชั่นไซน์และโคไซน์
ลักษณะของสัญญาณเอาต์พุตของไซน์และโคไซน์แก้ไข
หลายคนคิดว่าตัวแก้ไขไซน์และโคไซน์ส่งสัญญาณสัญญาณไซน์ในการคดเคี้ยวครั้งเดียวและสัญญาณโคไซน์ในการคดเคี้ยวครั้งเดียวและความแตกต่างระหว่างทั้งสองคือ 90 °ซึ่งเป็นความเข้าใจผิด ตัวแก้ไขไซน์และโคไซน์นั้นเทียบเท่ากับอุปกรณ์มอดูเลตแอมพลิจูดและสัญญาณการกระตุ้นเทียบเท่ากับสัญญาณพาหะมักจะเป็นคลื่นไซน์ที่มีความถี่ 400Hz, 1,000Hz หรือสูงกว่า
สัญญาณไซน์และโคไซน์ที่เกี่ยวข้องกับความเร็วในการหมุนของโรเตอร์นั้นเทียบเท่ากับสัญญาณการมอดูเลตและเมื่อตัวแก้ไขอยู่กับที่เครื่องขดลวดไซน์และโคไซน์จะส่งสัญญาณสัญญาณพาหะและเมื่อมันหมุนสัญญาณมอดูเลตแอมพลิจูดมอดูเลต เมื่อตัวแก้ไขเป็นสองขั้วความถี่การกระตุ้นคือ 1,000Hz โรเตอร์จะหมุนที่ 3000R/นาทีและสัญญาณการมอดูเลตแอมพลิจูดจะถูกส่งออกจากคลื่นโมดูเลตไซน์ 50Hz ไปยังผู้ให้บริการไซน์ 1000Hz